PiCrawler
A 4-legged walking robot that always reminded me of a crab. This project was great practice for building an end-to-end robotics project. I used a kit version to start then designed a stronger model and used Isaac Sim for the first time to simulate and iterate, although, ROS practice washe main goal of this project.
Overview
Crab-like walker
PiCrawler is a compact quadruped walker designed to explore legged locomotion and full-stack robotics development. The project started with a kit-based build to get real motion quickly, then evolved into a redesigned CAD model focused on cleaner packaging and better geometry for simulation and iteration. Along the way, it served as an initial entry point into Isaac Sim while building practical experience using ROS as the integration layer.
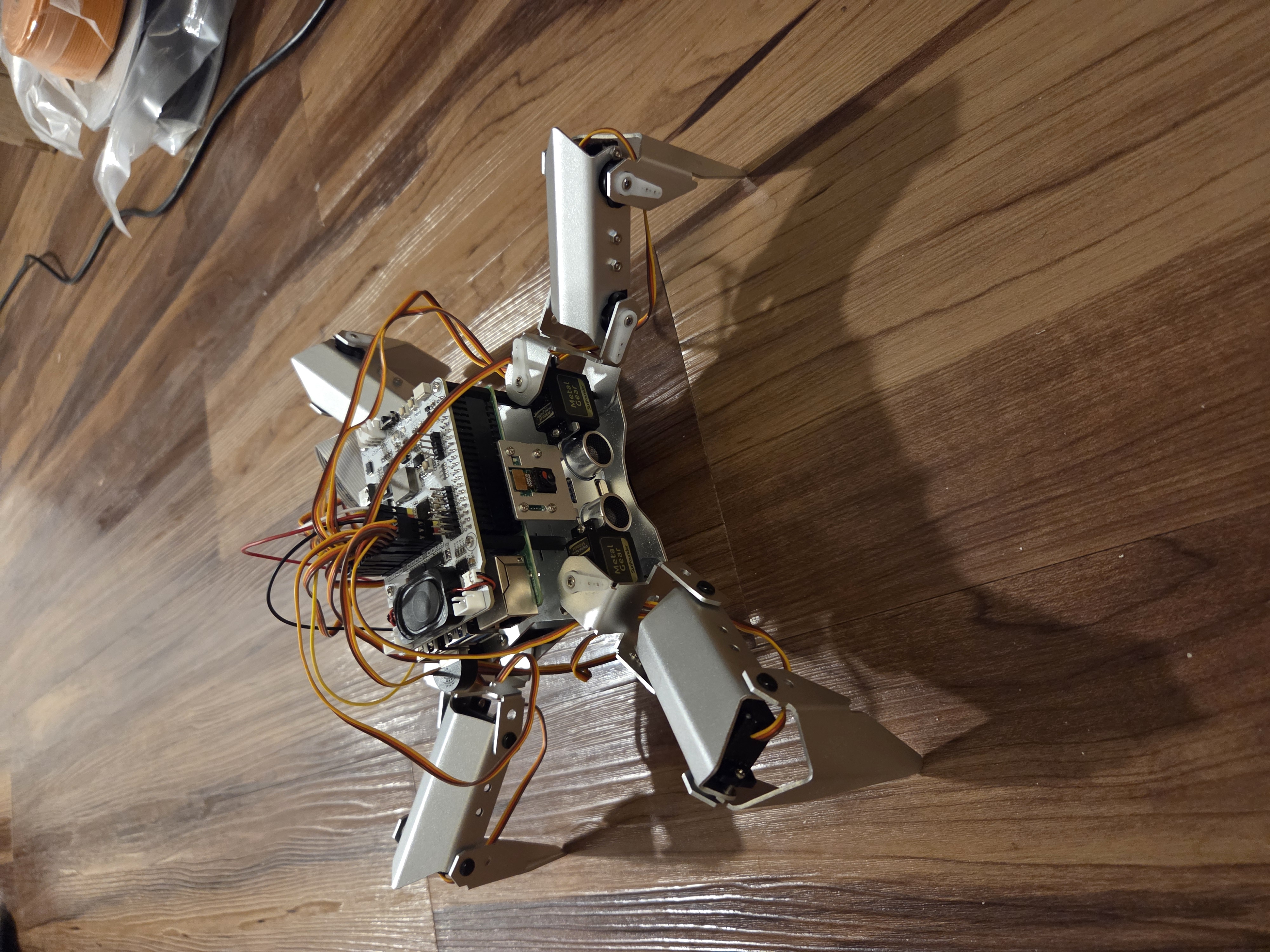
Real kit version
Build + run
Hands-on robot experience
The first version was built from a kit and tested in the real world. It was fun and was a way to get the ball rolling quickly while helping build the initial understanding. Getting a real system walking quickly made it much easier to understand what I could improve and how I could make it cooler.
Redesign + Isaac Sim
Better model, better iteration
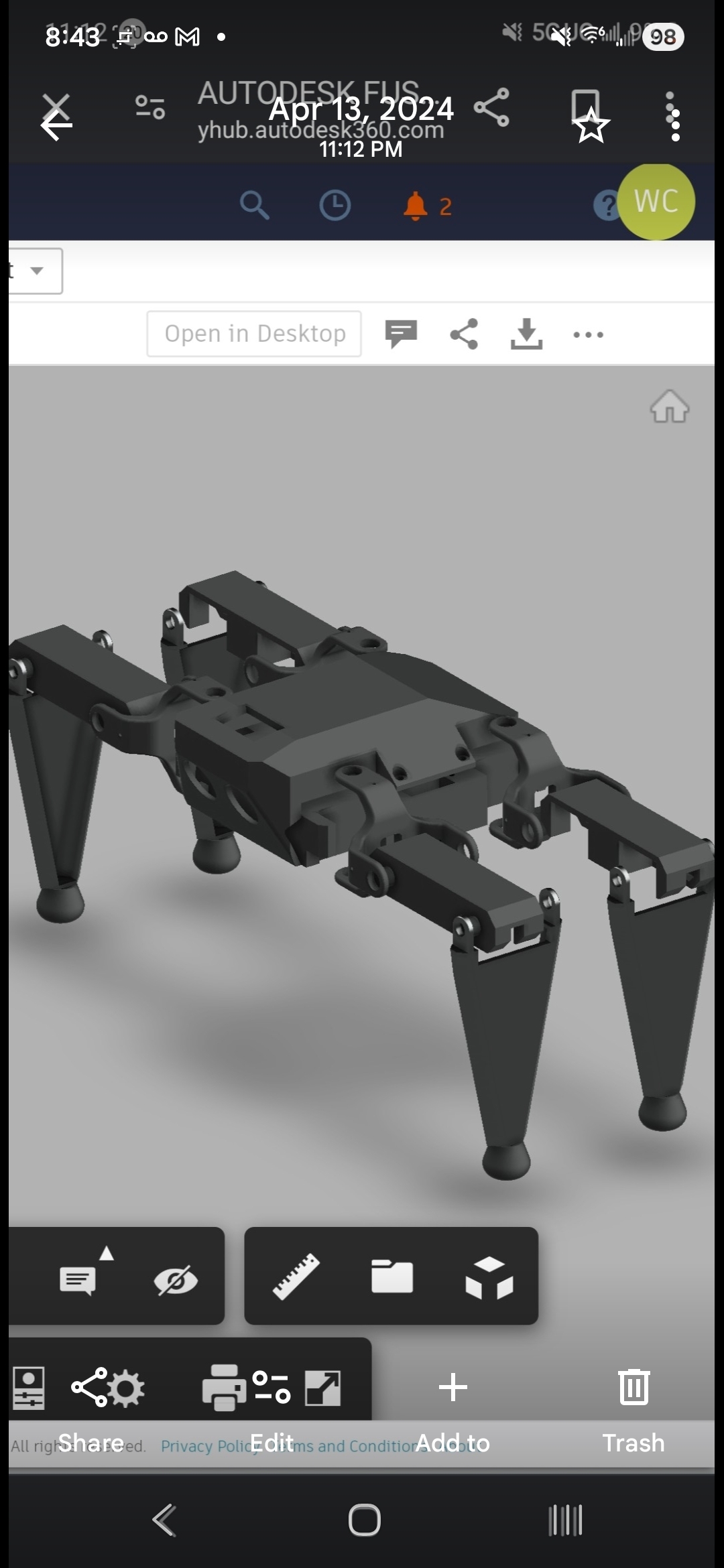
Simulation-first development
I designed a cleaner, more robust model and used it for simulation in Isaac Sim. This let me sanity-check motion, explore gaits, and iterate on geometry without risking hardware. It also became a strong first step into the Isaac Sim ecosystem, learning how to set up scenes, tune physics, and validate behavior.
ROS end-to-end practice
Integration layer
PiCrawler was a great end-to-end robotics exercise: hardware brings real constraints, simulation enables fast iteration, and ROS provides the structure to connect control, messaging, and experimentation into one workflow. It helped build comfort with the “full robotics stack” mentality. Individual components and specializations are cool, but what makes robotics the best in the world is making it all work together to bring an idea into reality.