Reachy Mini
I started with a stock Reachy Mini, then rebuilt its head to give it stereo vision — a camera in each eye for depth. I modified its custom PCB to run both cameras, wrote new detection software for them, and handed it the SO-101 so it can grab what it sees. Next up: a new body, a second arm, and eventually legs.
Overview
An expressive robot, given senses and a reach
The Reachy Mini is a small, expressive robot — great at communicating, but it ships without depth perception or a way to manipulate the world. This project is about closing those gaps: giving it real stereo vision, the software to make sense of what it sees, and an arm to act on it. It's become the platform where a lot of my other work comes together, and it's nowhere near finished — the roadmap at the bottom is where it's going.
Out of the box
A working baseline
Stock build
I assembled and ran the Reachy Mini exactly as it ships first. Getting the default robot up and behaving gave me a baseline to work from and a feel for the platform before I started cutting into it — which made every modification after this a lot more deliberate.
Stereo eyes
Custom camera mount + PCB mod

Two eyes, two cameras
To give the Reachy depth perception, I took the head apart and designed a custom mount that fits a camera into each eye. A single camera can't judge distance on its own; two, spaced like eyes, can. I then modified the Reachy's custom PCB so it could connect and run both cameras at once — the hardware foundation for everything the vision system does.
Seeing in depth
New detection software
Detection for the new cameras
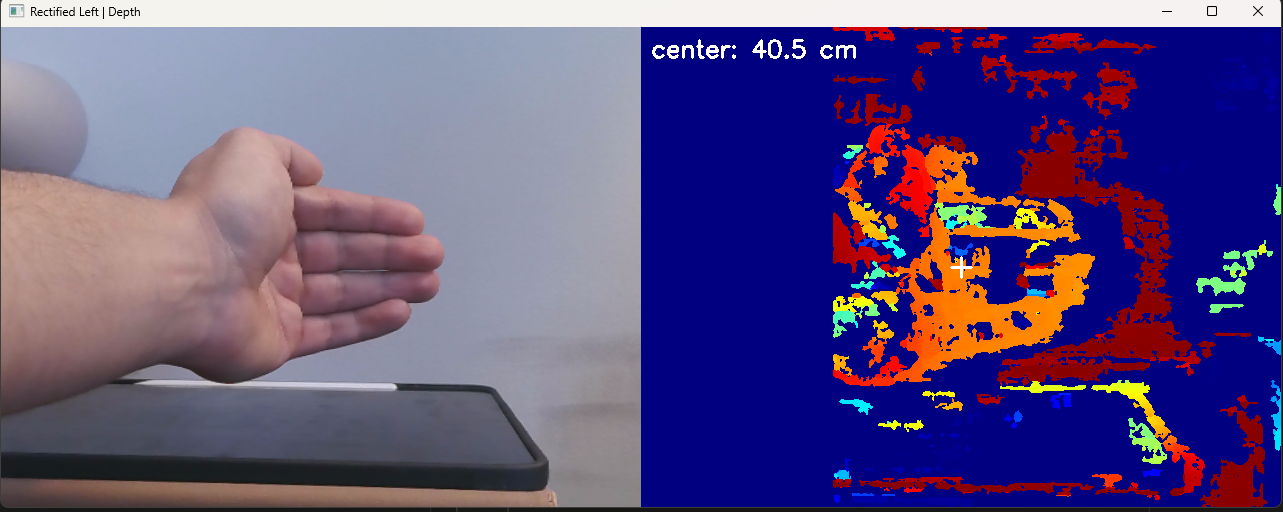
New eyes need new software. I wrote detection software built around the dual-camera setup so the Reachy can find objects and place them in space rather than just on a flat image. Lining up the left and right views turns two camera feeds into a real depth map — every pixel gets a distance, color-coded from near to far.
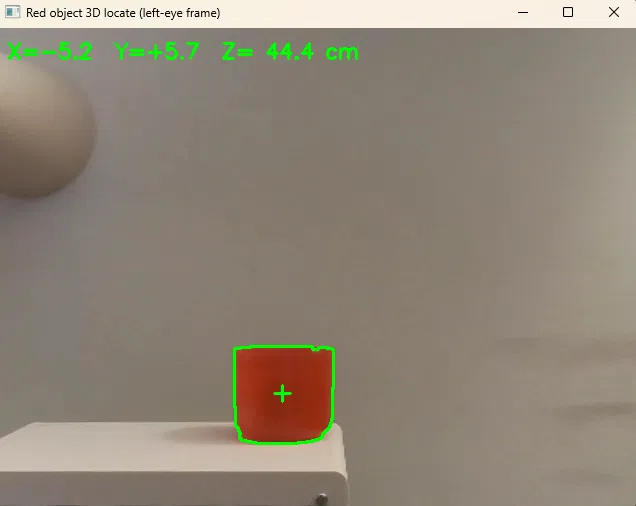
From depth to a 3D position
Once an object is detected, the stereo depth lets the software pin it to actual X, Y, and Z coordinates instead of just a box on the screen. That 3D position is exactly what the arm needs — a precise point in space to reach for.
Reaching out
Grabbing with the SO-101
From seeing to doing
With depth perception in place, I connected the SO-101 arm so the Reachy can act on what it sees. It detects an object, works out where it is in 3D — like the cup above — and uses the arm to reach out and grab it. That's the moment the whole stack pays off: eyes, software, and a hand all working as one system. More on the arm itself on the SO-101 Arm page.
What's next
The build keeps going